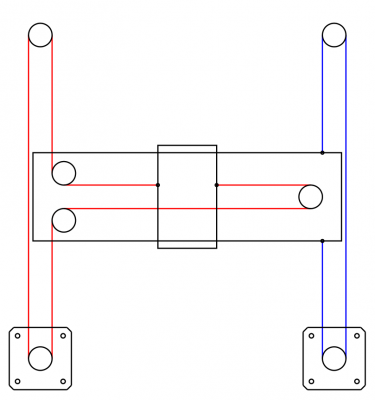
H bot
- tags: CNC MTM Machines
- Source: Double jump electric
- The problem with the Hbot style motion is that there is a net torque on the axis whenever there is a pure linear motion like moving the gantry left or right, this is because the force vectors do not cancel each other out and creates a net moment around the center of mass of the axis.
- with rigid setups, this can be avoided but this inherent force distribution will always be present.

-
Modified H bot
-
To solve the problem MIT engineers came up with the CoreXY setup.CoreXY
- H bot
Notes mentioning this note
CoreXY
tags: CNC Machines Resources Reprap CoreXY Double Jump electric Openbuilds H-bot corexy builds There is a change in the belt...
H bot
tags: CNC MTM Machines Source: Double jump electric The problem with the Hbot style motion is that there is a...
Machines
tags Machine Design Machines ZUND Digital cutting machine Roland MDX20 Small format precision milling machine. Omax Waterjet Machining center Abrasive...
Parallel Robot mechanism
tags: CoreXY #H bot CNC Machines Robotics Resources MIT 5 axis hybrid systems CNC Mill Parallel mechanism papers One advantage...
Robotics
tags: Mechatronics Resources Machine learning for robot kinematics #Marginally clever CNC ROS for rest of us Joshua Awesome list of...