CoreXY
- tags: CNC Machines
- Resources
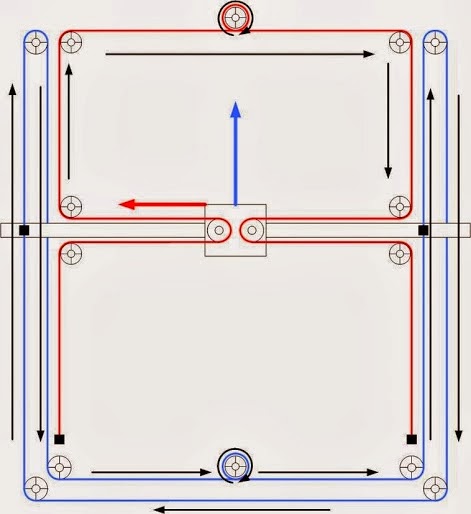
- There is a change in the belt pattern from the H-bot arrangement to the CoreXY arrangement. The belt loads on the carriage of an H-Bot tends to rotate it around Z axis. So the positioning accuracy rely only on the stiffness of the carriages. H-bot shall be very solidly built for good accuracy.
CoreXY mechanism add two pulleys to equilibrate loads and so the carriage stays always perpendicular without relying on the stiffness of the sliding mechanism.
-
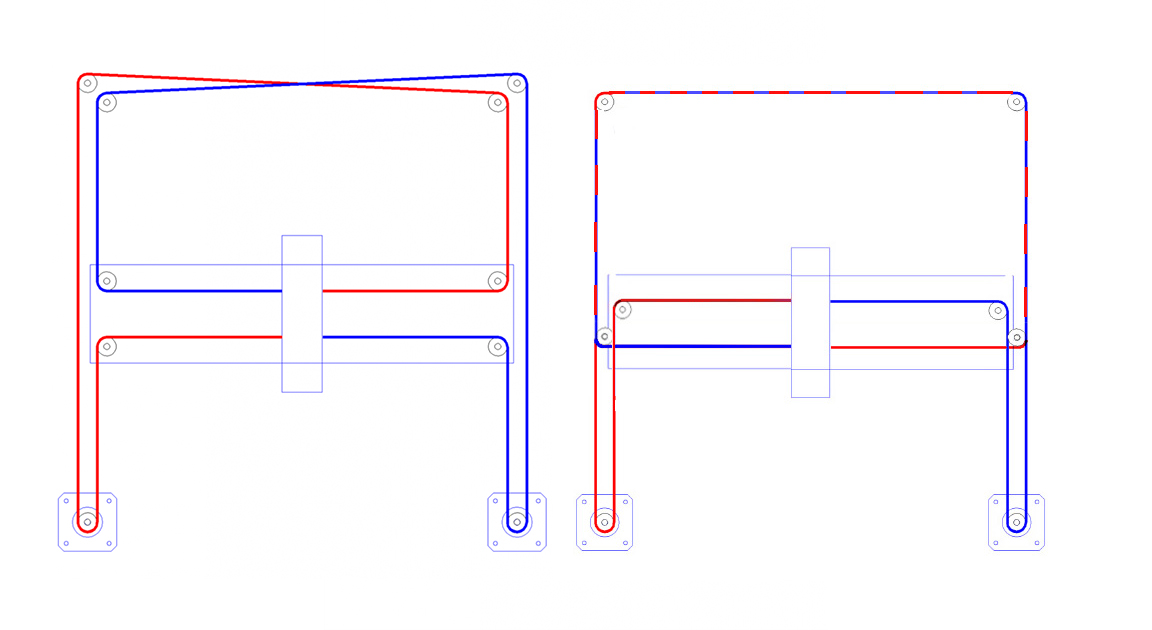
- There is two ways to built the CoreXY belt system.
- Both belts are on same plane so belts are crossing and they tend to rub one against the other at crossing point. Twisting the belt on the crossing path limits the rubbing. A small finger can be installed to separate the belts at crossing point.
- The two belts could be set on two different levels (see image). This creates a small tilting momentum on the hotend carriage and increase the momentum on shafts if pulleys are installed on cantilevered shafts. This also save some space on the return pulley side as the pulleys could be stacked.

- This solves the problem by crossing the belts in both sides, this is achieved by non-coplanar pulleys and motors. But the net forces always cancel each other out.
-
CoreXY designed by FABTOTUM
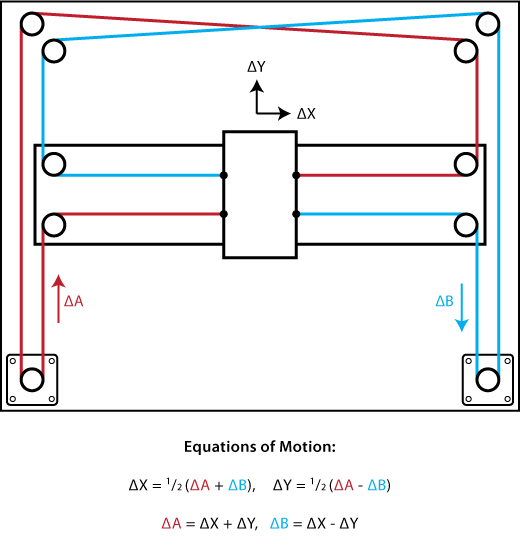
- The corexy uses the following dynamics to determine how much each motor should move to translate rotation of the stepper motors into the x y coordinate system. The image below is from Ilans page (corexy.com).
Therefore, the forward matrix (A,B to X,Y) is [0.5, 0.5 ; 0.5 -0.5].
The reverse matrix (X,Y to A,B) is [1, 1; 1, -1]
-
Optimal arrangement of the belts
- Source : Corexy belt layout
- Certain sections of the belt need to be parallel to the axis of the machine. When belts are not parallel, then the length of the belts change when the extruder carriage moves across the table.
- Take into account the belt thickness which can give offset in the belt parallels.
- Steel core GT2 belts are generally stiffer but do not bend very well. They have a min bend diameter of 25mm. Glass cores are ok, bend very well and do not suffer from fatigue as much.

-
Disadvantages
- Proper belt tension needs to be maintained to prevent early wear of the components.
- The frame needs to be square to prevent dimensional inaccuracies, and added corner brackets need to ensure that the frame stays square.
-
Rikadenki pen plotterDual wire Gantry
- Olden day pen plotter with Dc motor and potential meter for plotting hysteresis curves. Link for detailed information.
- Dual wire gantry 3D printer
-
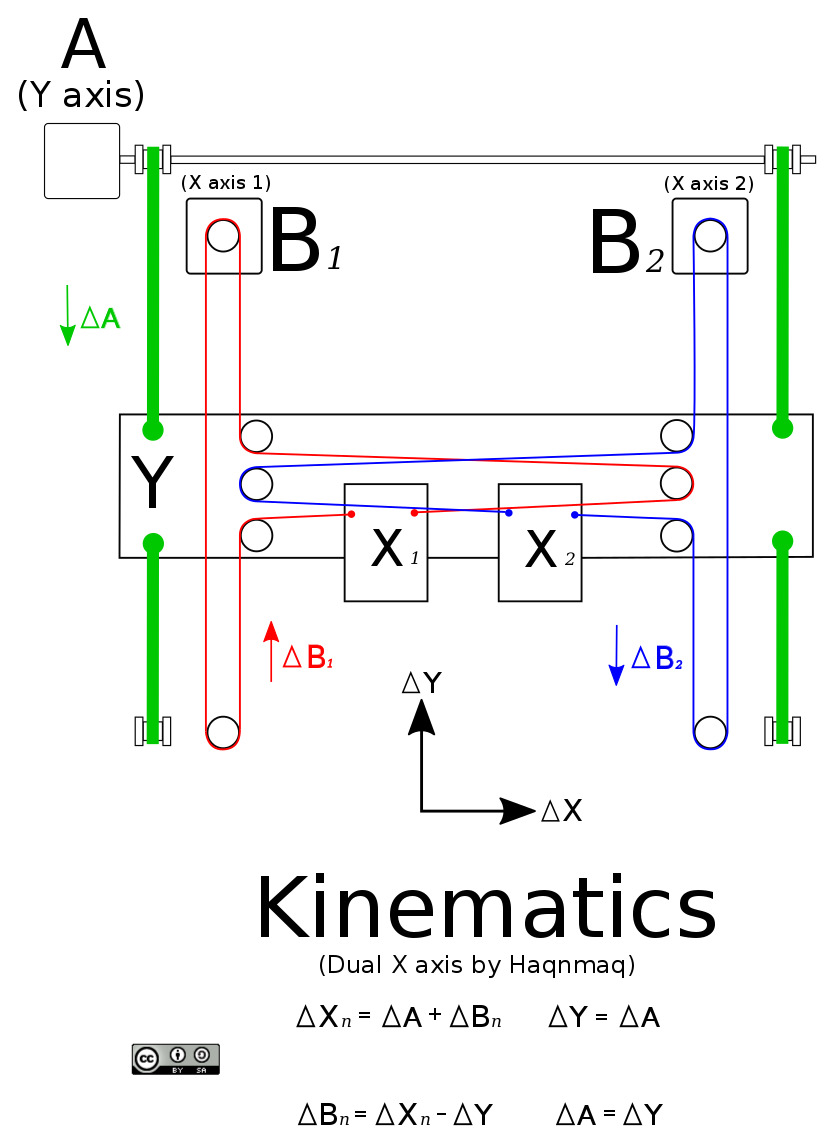
Dual X gantry
-
To solve the problem MIT engineers came up with the CoreXY setup.CoreXY
- CoreXY
Notes mentioning this note
3D Printing
tags: CNC Machines MTM Resources Common 3D printing troubleshooting Common problems with examples and solutions. 3D printing Guide Non planar...
CoreXY
tags: CNC Machines Resources Reprap CoreXY Double Jump electric Openbuilds H-bot corexy builds There is a change in the belt...
H bot
tags: CNC MTM Machines Source: Double jump electric The problem with the Hbot style motion is that there is a...
Machines
tags Machine Design Machines ZUND Digital cutting machine Roland MDX20 Small format precision milling machine. Omax Waterjet Machining center Abrasive...
Parallel Robot mechanism
tags: CoreXY #H bot CNC Machines Robotics Resources MIT 5 axis hybrid systems CNC Mill Parallel mechanism papers One advantage...
Robotics
tags: Mechatronics Resources Machine learning for robot kinematics #Marginally clever CNC ROS for rest of us Joshua Awesome list of...