Stepper Motor
- Tags: CNC Motors #Servo Stepper
- Resources
- Gecko Stepper Basics
- Stepper basics Oriental motors
- Electromate various stepper motors
- Stepper tuning
- stepper motor basics nanotech Youtube
- Working principle of varioius stepper motors Homofasicines Youtube
- Stepper accel derivations
- Generate stepper motor accel in real time
-
Stepper motor for High Speed
- Time constant for stepper motor is given by ratio L/R and is the time to reach 63% of charge or discharge. Higher voltages help push more current faster but will lose a lot of power due to eddy currents as heating is not depended on load but on the PWM frequency and duty cycle.
- Stepper drives
- Driver IC #IC Chips
- DRV8428 35V 1 A integrated current sensing
- Sourcing
-
Construction
-
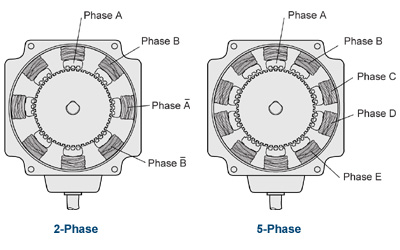
2 Phase motor vs 5 Phase motor Oriental motors
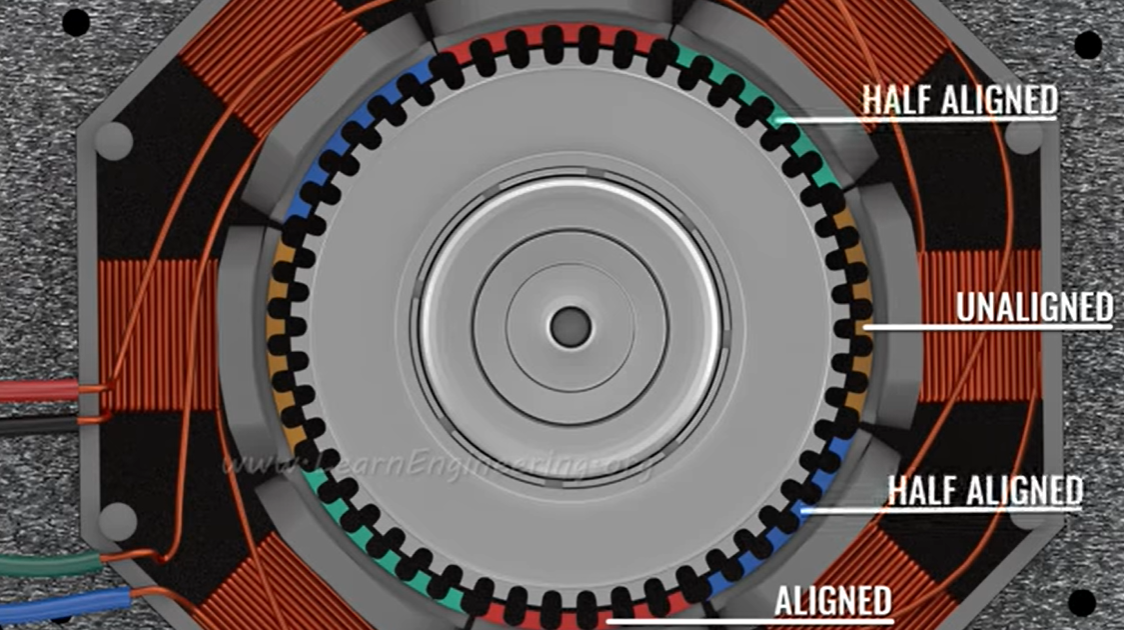
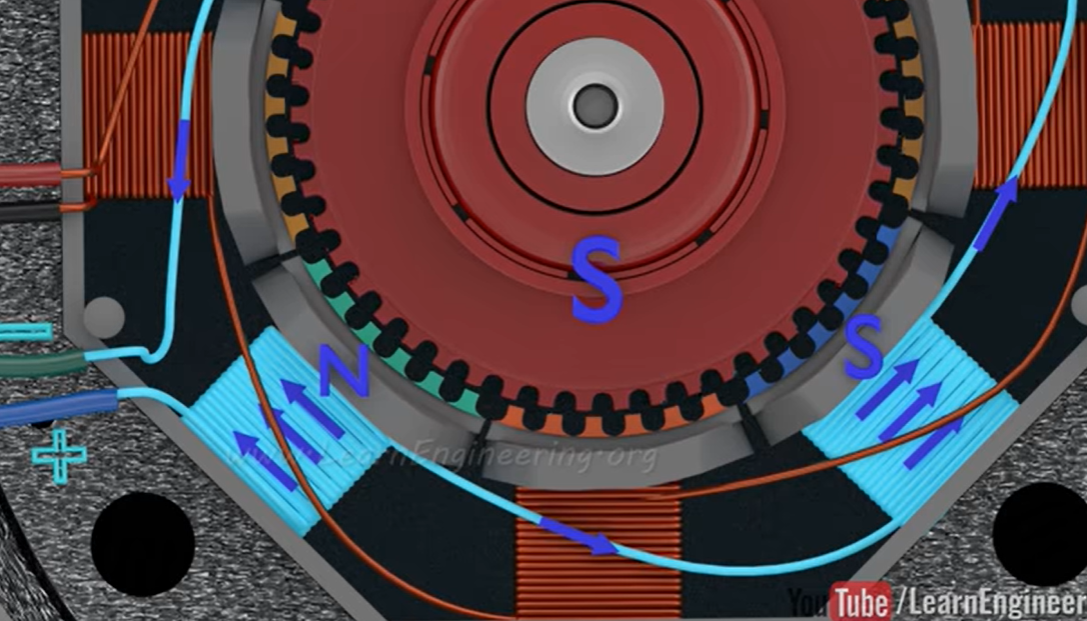
- Hybrid stepper motors have an axially magnetized rotor and 50 teeth. It utilizes both the reluctance and the magnets to move. The shaft side is the south pole of the rotor. The teeth on the north pole and south pole are shifted by one half tooth width.

- The stator has 2 few teeth and they are arranged into 4 coil pairs red, blue, green, and yellow. The way they are arranged is that one pair of teeth is aligned to the teeth on the stator and the other is unaligned. The remaining coils are only half-aligned.
-
2 Phase motor vs 5 Phase motor Oriental motors
-
Commutation
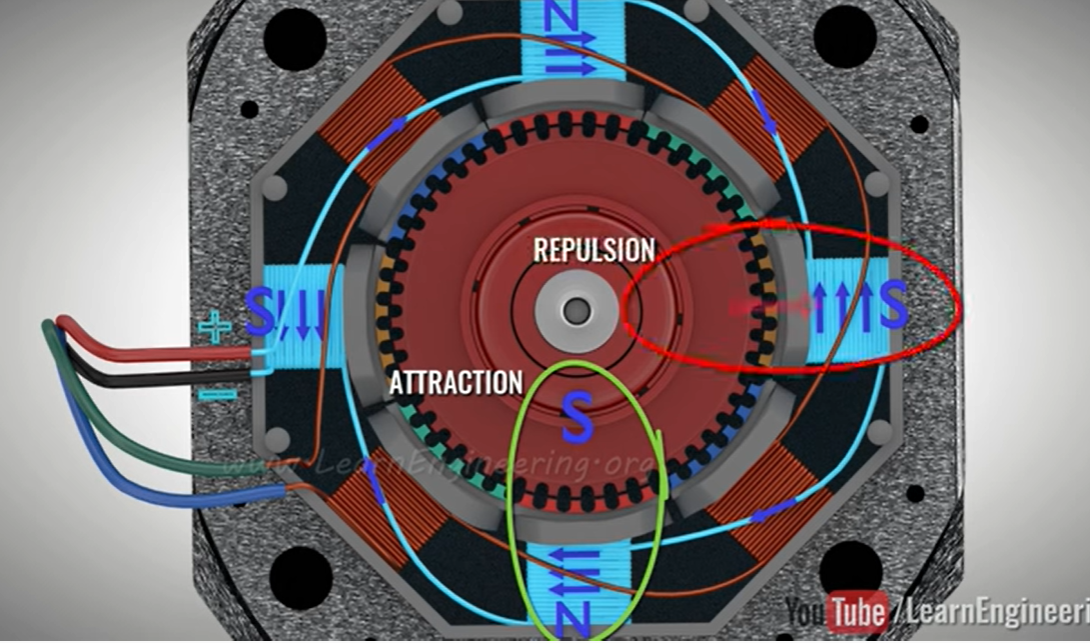
- In the first step, considering the shaft side south pole, when the first coil pair is energized the rotor aligns itself with the North pole, and the south pole attracts the North pole of the rotor which have teeth shifted by one tooth from the south pole of the rotor.
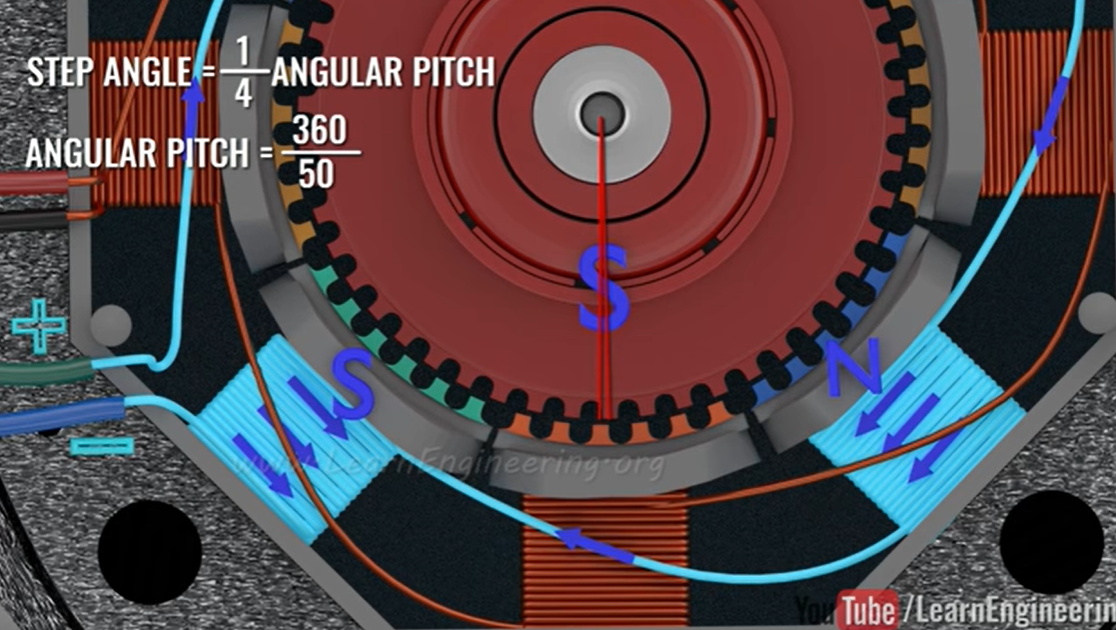
- When the coil B is energized the rotor has to move by a small angle equal to 1/4th the angular pitch which is 1.8 deg.
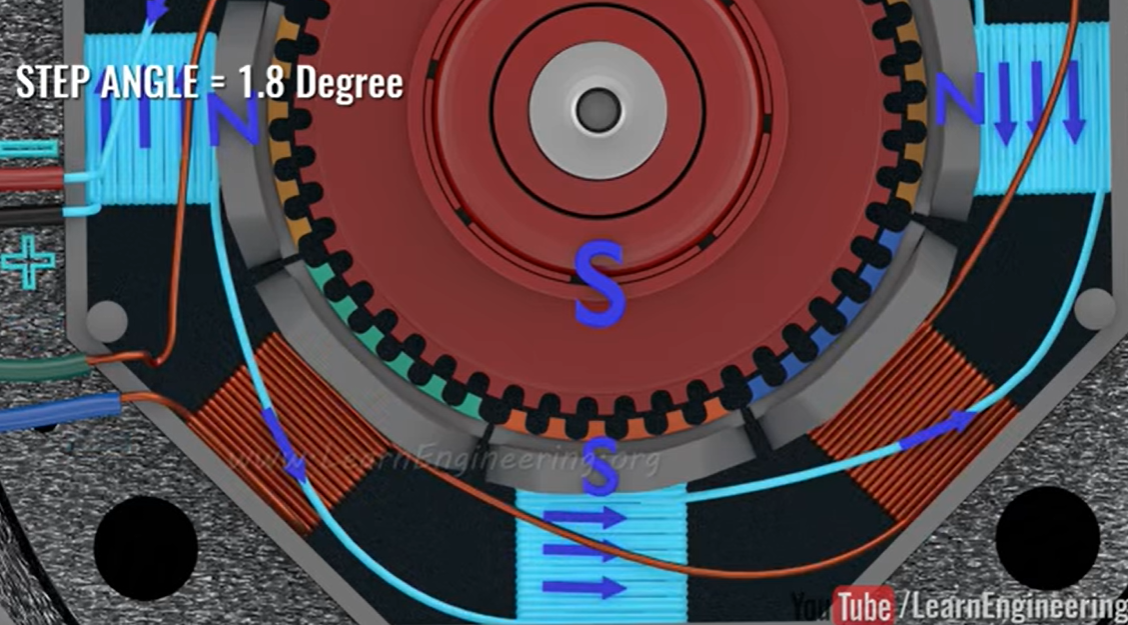
- Now the First coil is energized with the opposite polarity, and the rotor has to move by a small amount to align with the stator.
- The last step is to energize the second coil with the opposite polarity.
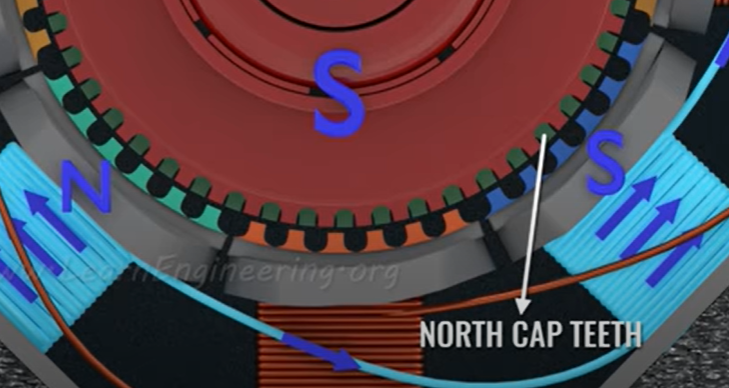
- The North end cap teeth are placed in between the south end cap teeth, this ensures that the opposite poles are in alignment with the stator.
-
Characteristics
-
Pullout Torque (Slew rate)
- It is the maximum torque that a stepper can generate at a given speed without missing steps. Found by accelerating the motor to a target speed and increased the torque on the shaft until the motor slips, performed over a range of speeds to get a curve.
-
 This is a plot of the pullout curve for a common stepper motor. The light-blue line contains the area of slew rate or pullout curve. The dark blue line plots the pull-in curve or start/stop region, which shows the maximum frequency at which a loaded stepper can stop and start without losing steps. The red line is mechanical power output. These plots change if there’s inertial mismatch.
This is a plot of the pullout curve for a common stepper motor. The light-blue line contains the area of slew rate or pullout curve. The dark blue line plots the pull-in curve or start/stop region, which shows the maximum frequency at which a loaded stepper can stop and start without losing steps. The red line is mechanical power output. These plots change if there’s inertial mismatch. - A related value is stepper motor pull-in curve — the maximum frequency at which a loaded stepper can start and stop without losing steps.)
-
Inertial mismatch #Drive Transmission #Impedance matching
- An ideal way to use a stepper motor is to match the inertia of the motor to that of the load but often not practical for higher performance, load : motor could be 3:1 but best to keep it under 10:1. Proper sizing of motor helps match inertia, else running the motor through long acceleration/deceleration cycles also helps but with less efficiency.
-
Pullout Torque (Slew rate)
-
Tuning Stepper motors
- TI tuning steppers
- Tuning means, how well the current regulation scheme maintains the current in a stepper motor’s coils. A poorly tuned stepper motor will have a jerky motion and significant vibration.
- Tuning the stepper motor can be time-consuming because finding the optimal fixed decay settings for a given motor, voltage, current and speed is a trial-and-error process.
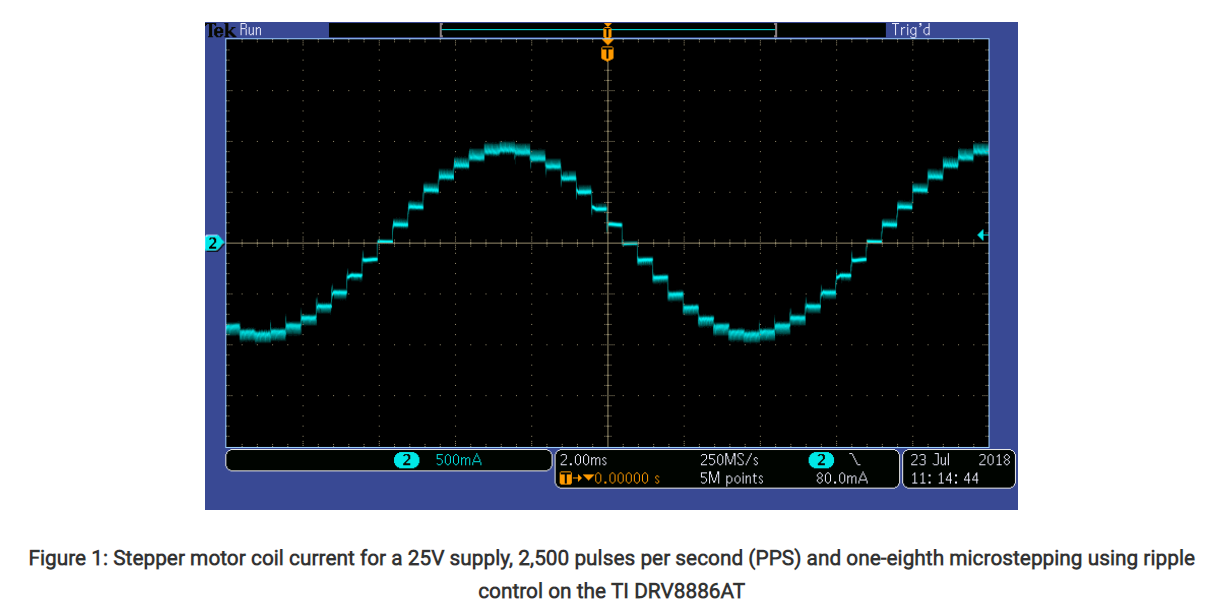
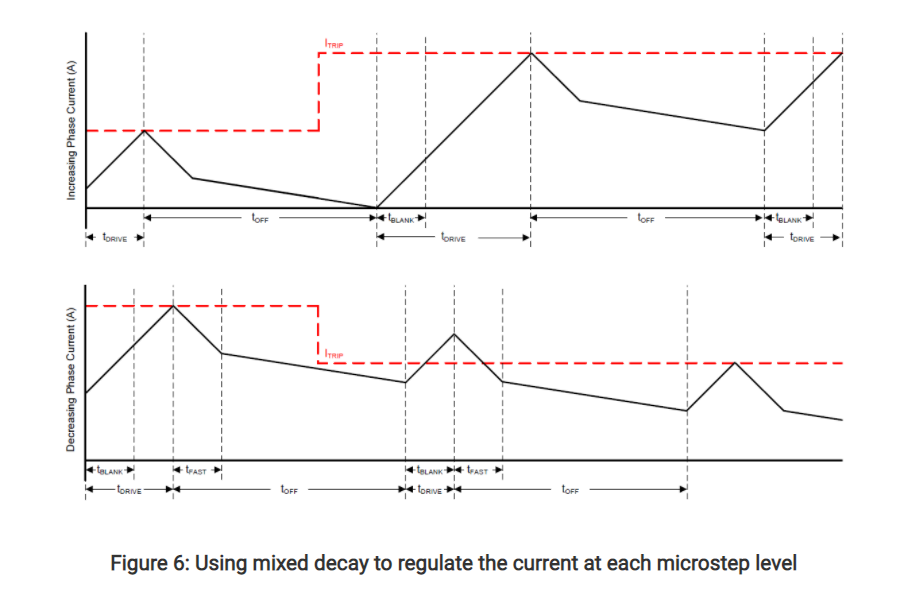
- A tuned waveform looks like the above.
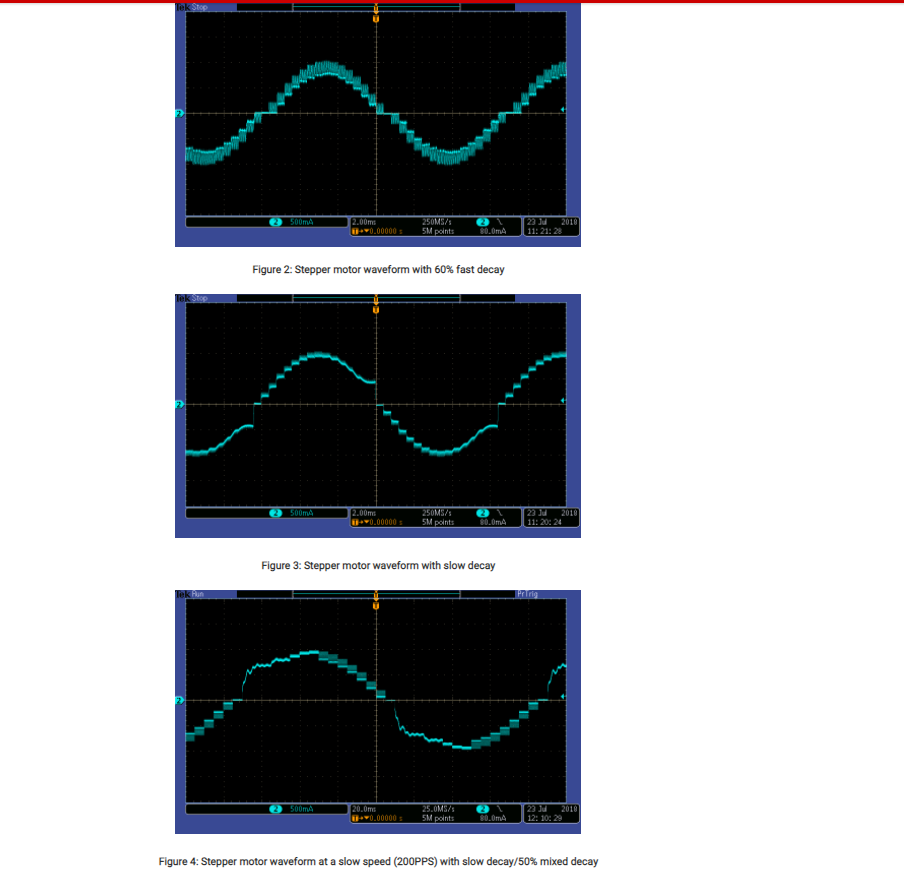
- decay setting chosen for the above current regulation scheme (also called current chopping) was not appropriate for the chosen motor, supply voltage, full-scale current, and speed.
- Stepper **motor tuning is the process of choosing the proper decay setting **during the off time of the PWM current chopping cycle (tOFF).
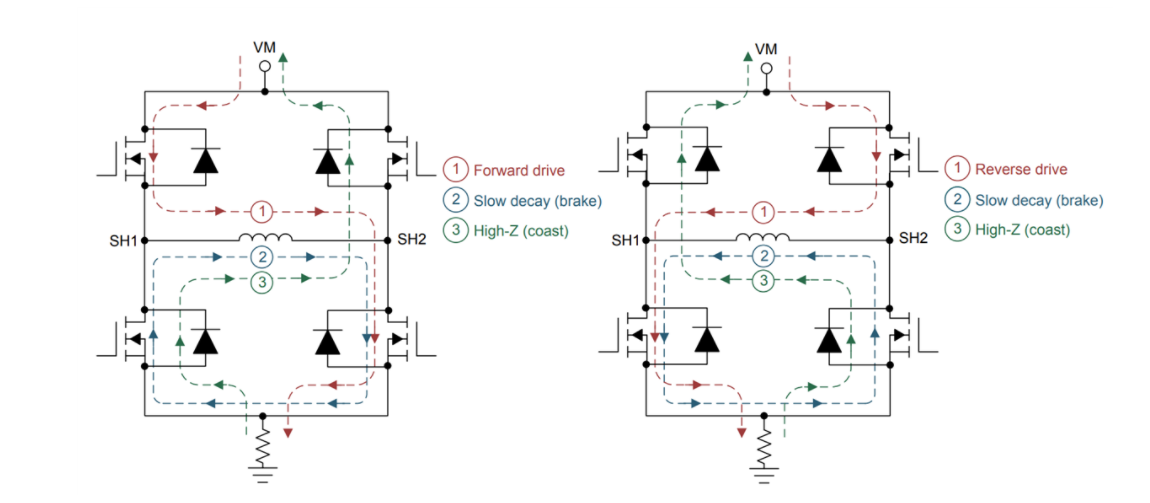
- During fast decay, the field-effect transistors (FETs) opposite from the driving FETs turn on, and the current flows from the motor back to the power supply. For this condition, the current decreases quickly. During slow decay, the two low-side FETs turn on, and the current recirculates through these FETs. For this condition, the current decays much more slowly.
- High step rate causes back EMF of the motor to be significant, and slow decay is not sufficient to regulate the current during the decreasing steps.
- During stepper motor tuning, engineers search for the optimal “mixed” decay setting for the stepper. Mixed decay consists of a combination of fast and slow decay when the driver is not driving current into the coils. Choosing the mixed-decay settings means setting the percentage of fast decay versus slow decay for the off time.
- Devices like the DRV8880, DRV8881 and DRV8886AT have smart tuning features that can help eliminate the time-consuming effort of stepper motor tuning.
- tags: CNC Motors #Stepper Motor
Notes mentioning this note
Applied Robotic Stanford CS235
tags: Robotics #Making Prototypes Source CS235 Youtube What makes a good robot designer is the attention to the details. Every...
Motors
tags: Brushless DC motors Robotics Actuators Resources Understanding motors Youtube Jatzen lee, Space vector commutation, Clark park transform, sinusoidal, FOC...
Servo Stepper
tags: CNC Motors #Stepper Motor Resources Low cost FOC control for Stepper motors FOC stepper FOC Hybrid Stepper motor Odrive...
Stepper Motor
Tags: CNC Motors #Servo Stepper Resources Gecko Stepper Basics Stepper basics Oriental motors Electromate various stepper motors Stepper tuning stepper...